「温調弁のハンチングが収まらない…。」という場面に出くわしたことはありませんか?
船舶用の主機及び補機エンジンの冷却水の温度調整に使用される温調弁には、電子サーボ式など温調器からの信号により動作するタイプのものがあります。
温調弁のハンチングを改善するためには、温調器のPID制御を正しく理解しておくことが重要です。
本記事では温調弁のPID制御について、分かりやすく解説します。ぜひ参考にしてください。
電子サーボ式温調弁は、温調器がセンサ(白金測温抵抗体)からの抵抗値を受けて、出力信号をサーボモーターに入力することで弁を駆動させるタイプの温調弁です。
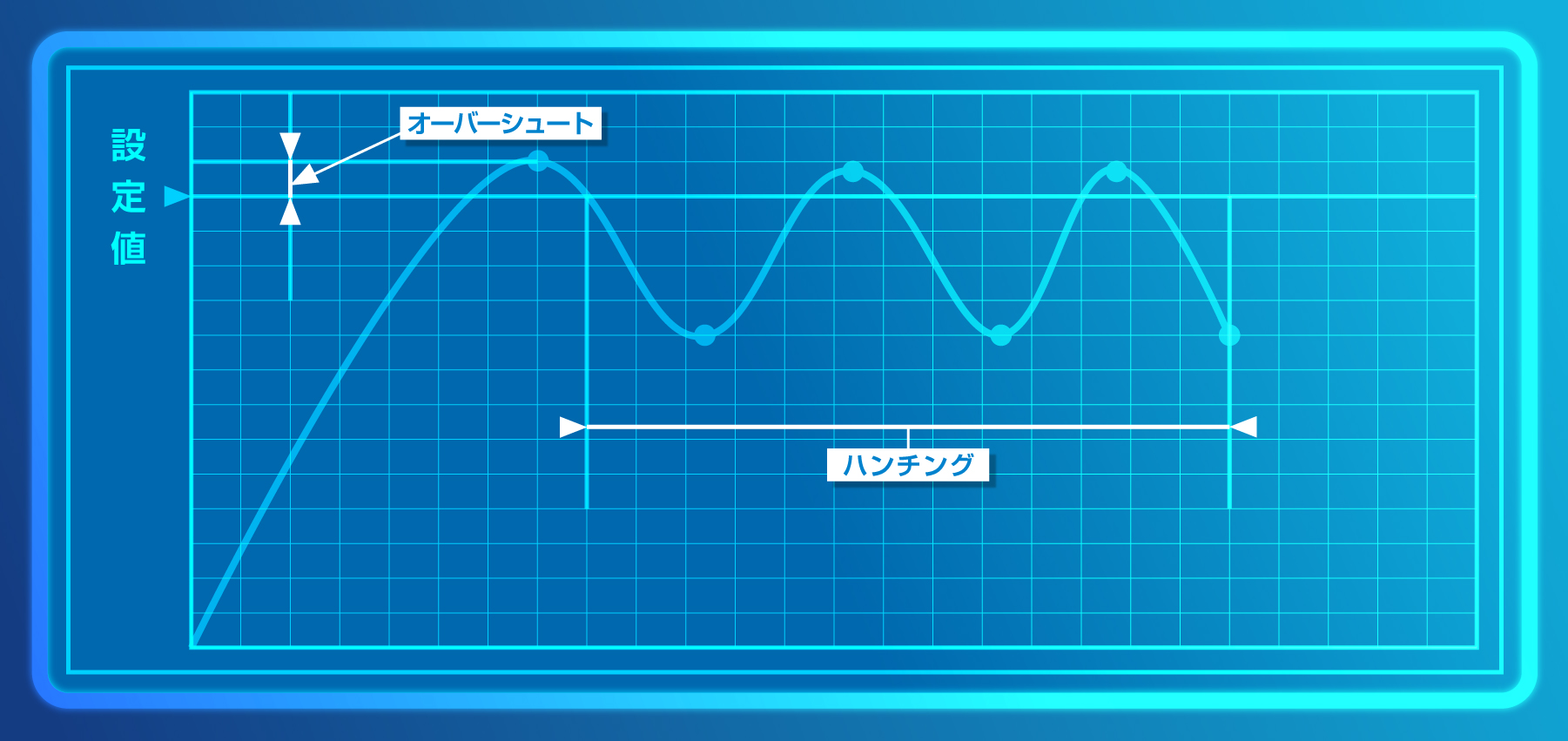
温調器とセンサを使用する電子サーボ式温調弁では、稀にハンチングやオーバーシュートといった現象が発生します。
● ハンチング:温度が安定せず、上がったり下がったりを周期的に繰り返す状態
● オーバーシュート:目標温度を超えてしまう現象
エンジンなど機器の冷却水温度を調整する温調弁において、温度が安定しないということは、エンジンなどの性能を十分に発揮できないことにもつながります。
頻繁にハンチングを繰り返すと、サーボモーターの寿命にも影響しますので、注意が必要です。
温調弁における温調器の役割は、目標温度とセンサからの抵抗値を比較して、その偏差に応じてサーボモーターを制御することと言えます。
代表的な方法であるPID制御を分かりやすく解説します。
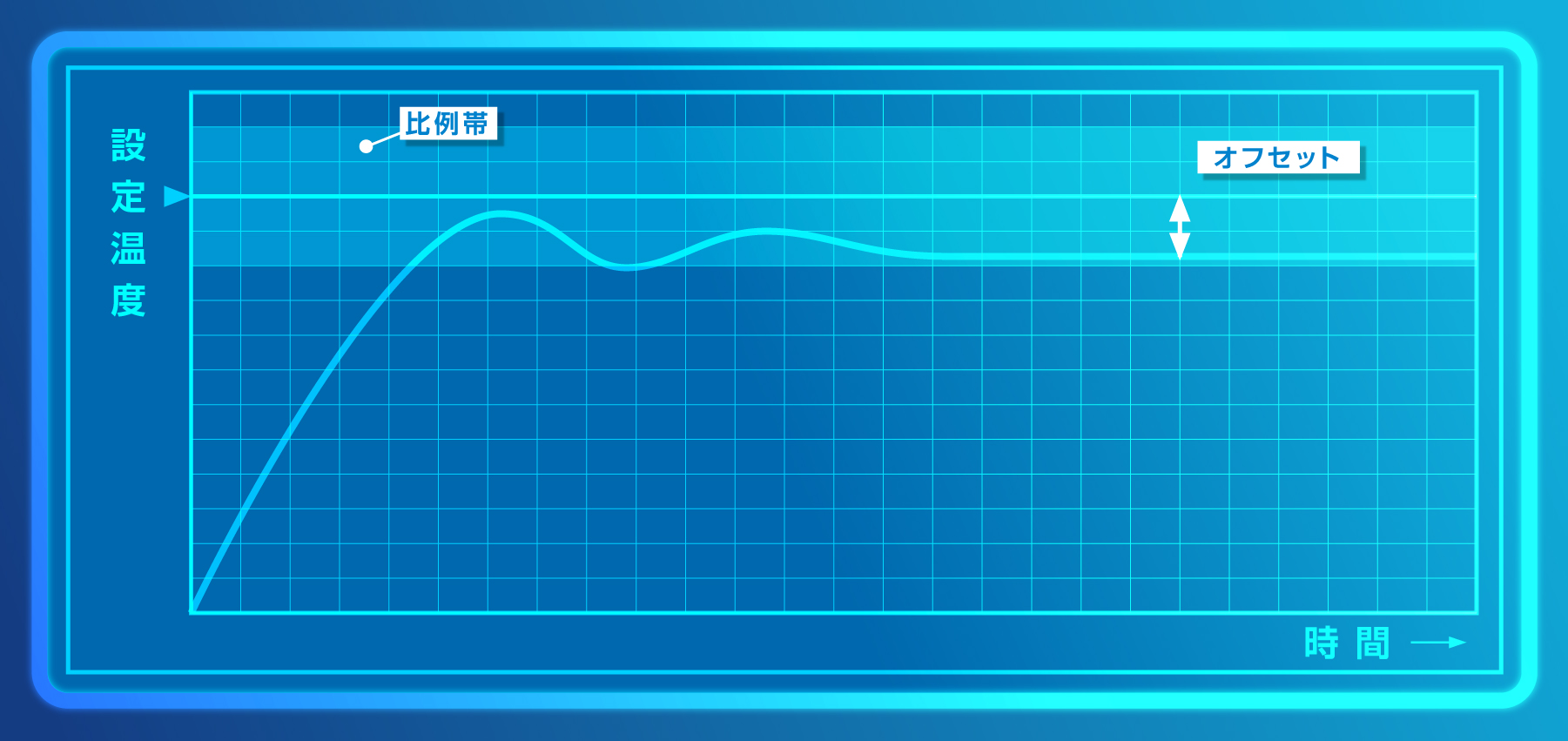
PはProportionalの頭文字を取ったもので「比例」の意味です。【単位:%】
Pの値により、温調器の入力レンジを基準として、何%を比例帯とするかを設定します。
【例】
・0℃~100℃の入力レンジの温調器
・Pを30%に設定
・設定温度を80℃に設定 →80℃を中心に30℃レンジ(65℃~95℃)が比例動作の範囲となる。
P動作を上記の例で考えると、65℃になるまでは操作量が100%、95℃になると0%になります。
Pの値を大きくすれば、目標温度から離れた温度から比例動作を始めるようになるため、オーバーシュートすることは少なくなるでしょう。
しかし、その分目標温度までの到達時間がかかってしまいます。
一方でPの値を小さくしすぎると、目標温度付近で比例動作が始まるため、オーバーシュートやハンチングが起きやすくなります。

IはIntegralで「積分」の意味です。【単位:分または秒】
P動作だけではオフセット(偏差=目標温度との差)が生じてしまいます。
I動作はオフセットを解消するためのものです。
I動作はオフセットをなくすように連続的に操作量を変化させます。
Iの値が小さくなればなるほど、短時間で温度を引き戻そうとするため、敏感に作動することが特徴です。
この場合、ハンチングが起きやすくなるので注意が必要でしょう。
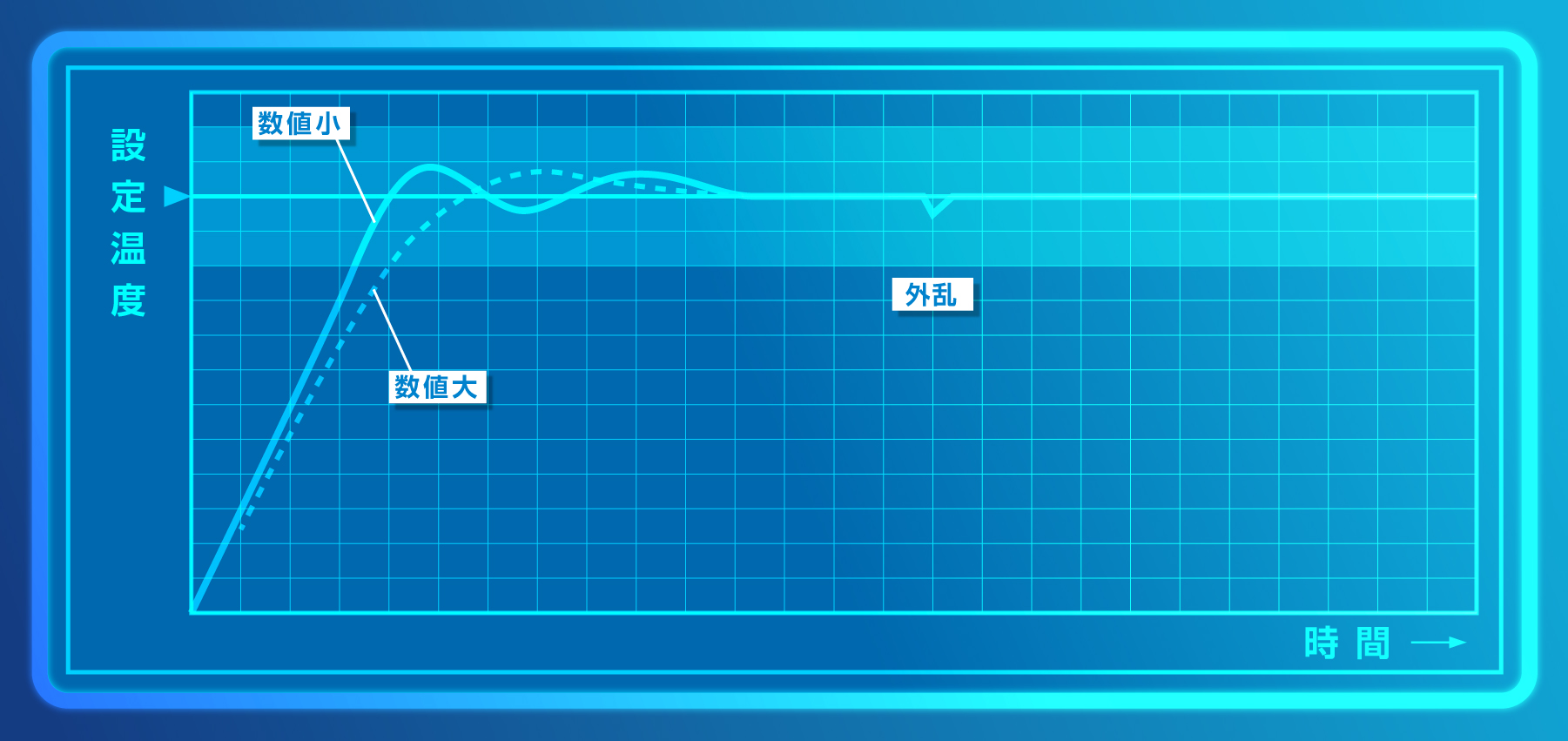
DはDerivativeの頭文字を取ったもので「微分」を表します。【単位:分または秒】
I動作はオフセットを無くすように作動しますが、外乱など急激な温度変化に対応することができません。
D動作は急な温度上昇や下降の変化に反応して、出力を修正する役割を持ちます。
PI動作無しで単独でD動作を行なうことはできず、あくまで補助的な動作だと言えるでしょう。
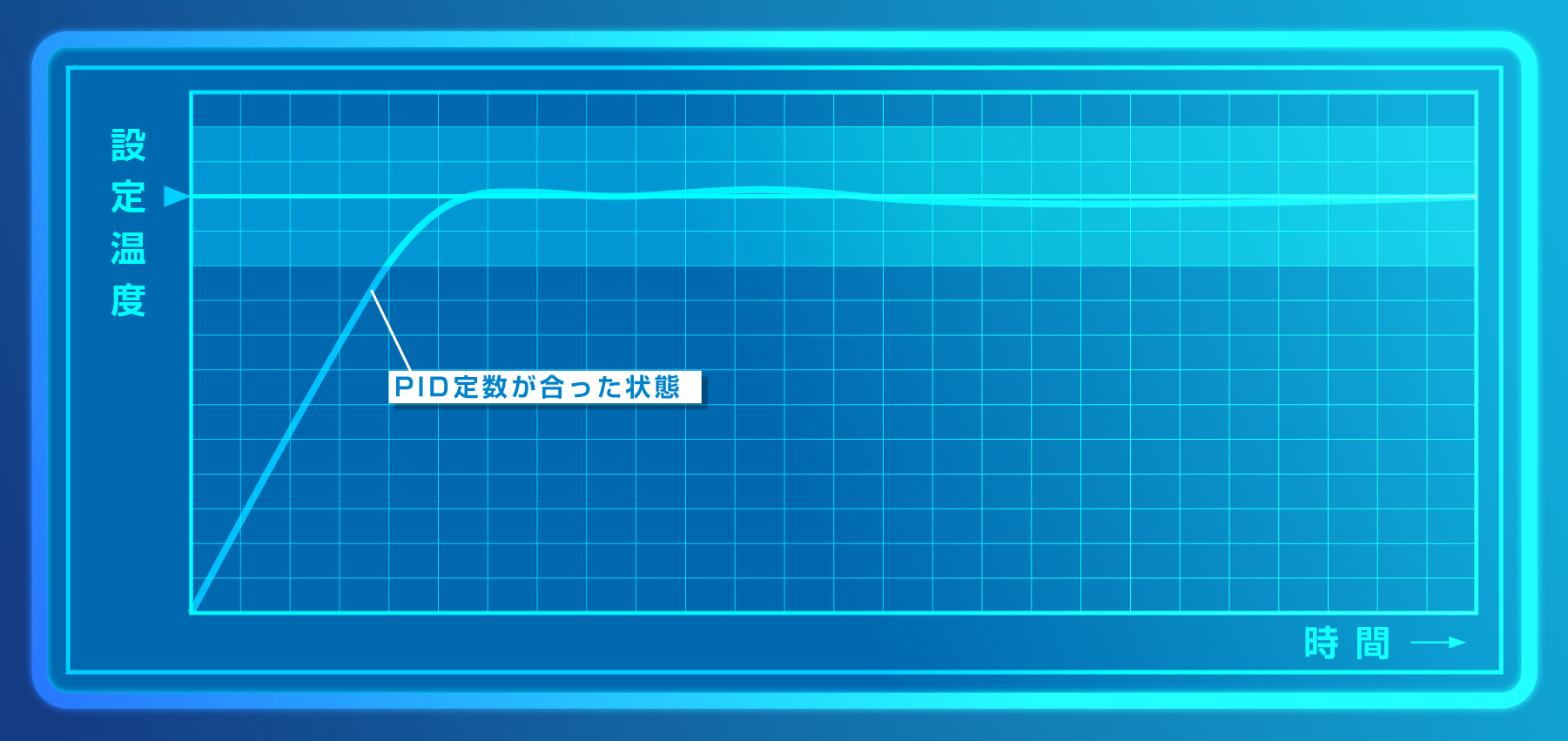
説明してきたP動作、I動作、D動作を組み合わせたものがPID動作です。
P動作で出力する範囲を決定し、I動作でオフセットを解消、D動作で修正することによって、目標温度に近い温度調整が可能となるでしょう。
それぞれの動作が上手に作用することで、理想的な温度調整を実現しています。

PID制御は比例、積分、微分を組み合わせた温度制御方法です。
これだけ聞くと「何だか難しい…。」と感じる人もいるでしょう。
電子サーボ式温調弁を制御するために使用している温調器には「オートチューニング機能」が備わっています。
オートチューニングを行なうことで、自動的に適切なPID値を設定することが可能です。
オートチューニングを行なっても、ハンチングやオーバーシュートが解消しない場合は、個別にPID値を設定していくこととなります。 温度調節弁の製品ラインナップ
PID値をどのようにして設定すれば良いか分からない場合は、TPR商事までお問い合わせください。
状況をヒアリングして、トラブル解消のお手伝いをさせて頂きます。